|
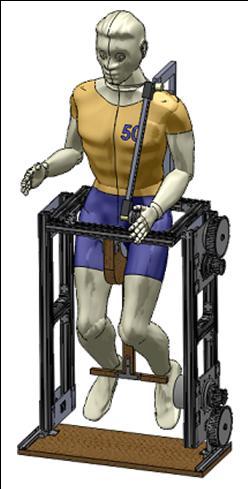
マニュアル制御を用いた装着型脚支援システムの研究 脊髄損傷等が原因の下肢障碍を持つ方に装着して、歩行を始めとする日常動作を実現させるための支援装置を開発しています。 健常な腕で保持したレバーを操作することでアクチュエータを搭載した脚支援装置を制御するマニュアル制御を採用しています。 腕の姿勢と脚部の動作を対応させることで装着者が脚支援装置の挙動を理解しやすくなり、訓練の繰り返しによる動作の効率化が期待できます。 |
 |
立位安定化に関する研究 両脚に障碍を持つ方が脚支援システムを装着した際、健常者のような足裏感覚を使用できず、立位姿勢安定化が困難になります。 そこで、足裏情報を触覚や視覚により上半身へ伝達することで、立位姿勢安定化を実現します。 また、マニュアル制御と自動制御の併用により、安定性向上を目指します。 具体的には立位安定化評価システムや足裏情報伝達装置の開発、制御設計を行っています。 |

|
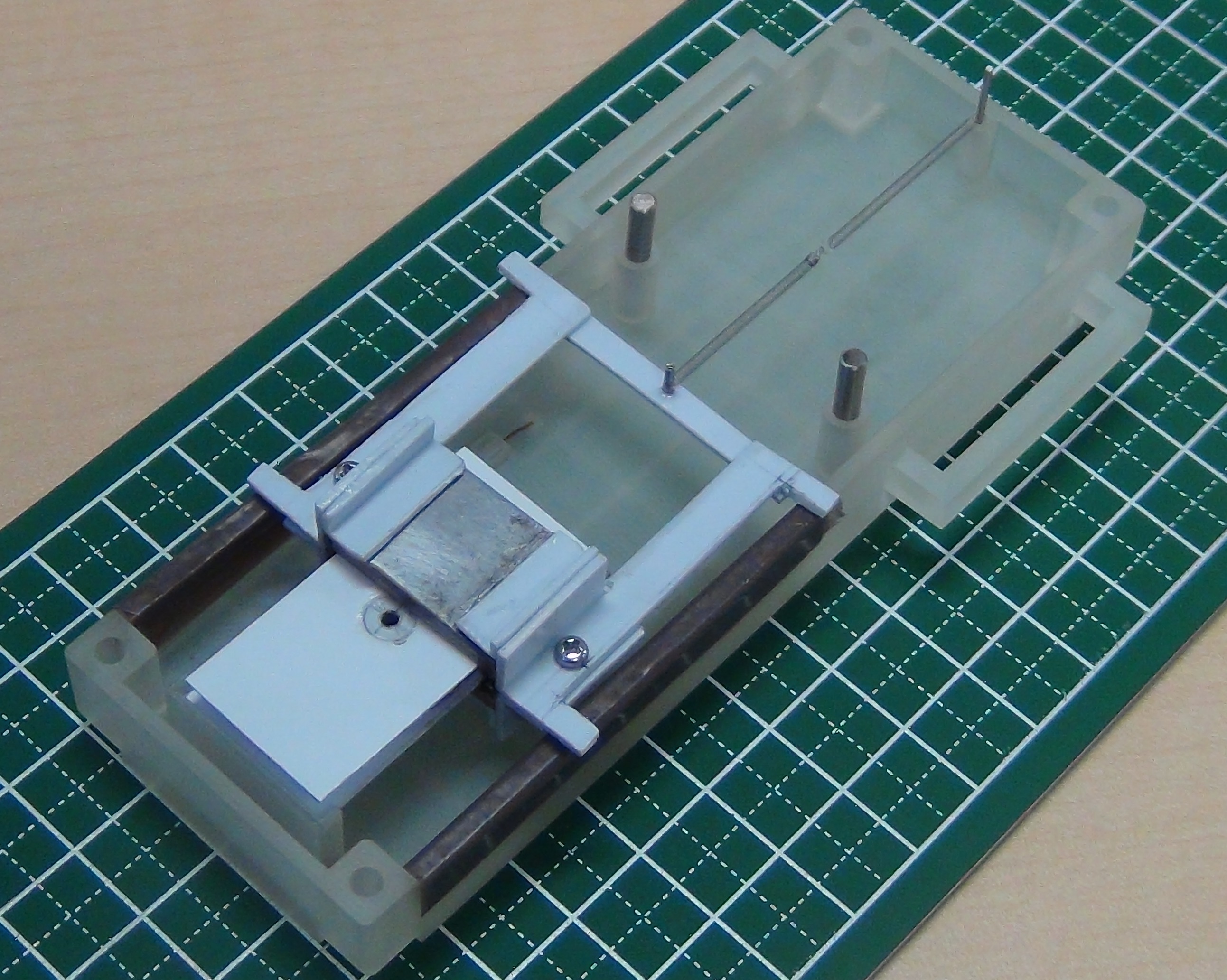
一脚ホッピングロボットの研究 災害現場等での不整地を走行する一脚ホッピングロボットの研究がおこなわれています。 ロボットの設計・製作、制御プログラムを作成しシミュレーションを行い、二次元平面内で安定した跳躍を行うロボットの実現を目指しています。 |
|
三輪クラスタ型倒立移動ロボットの研究 段差・階段を移動する三輪クラスタ型倒立移動ロボットを開発しています。 階段との噛み合わせと昇降時の衝撃を考慮し、3輪クラスタ機構を採用しています。 機構設計、モデリング、制御設計を行い、安定した段差昇降を行うロボットの開発を目指しています。 |

二次元平面内において安定した連続跳躍を行うことのできるロボットの実現を目指しています。
具体的にはロボットの設計製作、制御プログラムの作成、およびそのシミュレーションを行っています。

二次元平面内において安定した連続歩行を行うことのできるロボットの実現を目指しています。
ASIMO等のZMPを利用した歩行でなく、準受動歩行で連続歩行を行います。
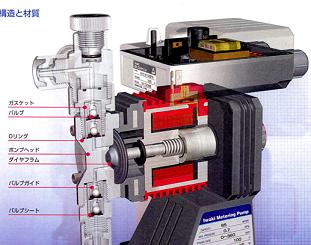
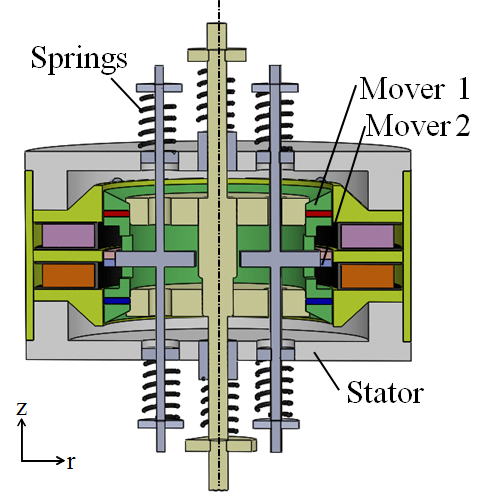
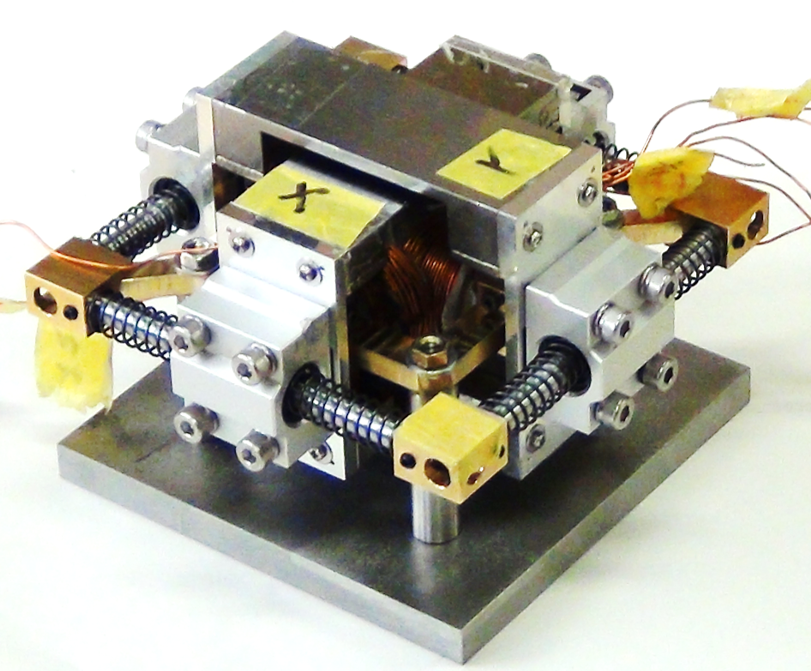
永久磁石内蔵型で、高効率で高推力、ストロークの短いアクチュエータの開発とその制御方式の研究を行っています。